星空·体育中国官方网 基于VI的智能车仿真系统设计
1 引言
国家教育部委托全国高等学校自动化专业教学指导分委员会,主办首届“飞思卡尔”大学生智能车邀请赛。为了给参赛队伍提供可脱离网络或联网的模拟环境,以及理论实验场所,我们研制了运用LabVIEW虚拟仪器技术的智能车模拟软件Plastid(简称Plastid)。
该模拟平台借助LabVIEW虚拟仪器技术构建而成,旨在对智能车辆的算法进行模拟与评估。其核心优势体现在多个方面:
1. 赛道与赛车环境模拟
系统单独为赛道和赛车创建了模型,用户能依据指引便捷地自主规划赛道形态及车辆构造,赛道可规划成多样的直线、曲线、斜坡星空体育平台官网入口,车辆可设计成不同的体积和轮廓,以此提升系统的通用能力。此外,该软件特别适合缺乏场地搭建赛道条件的参赛者,他们可借助此平台测试控制方案。
2. 控制算法的仿真验证
系统具备三种不同的仿真方案可供选用:基于子VI的算法模拟、针对C节点的仿真方法以及单片机实时仿真技术。用户能够挑选最契合自身需求的仿真方式,在系统平台中检测控制算法的实际表现。
3. 路径识别的方案分析
系统内置了通过光感元件识别路线的方案,用户能够依据个人需求确定传感器的数量和布设点,在Plastid软件中反复进行模拟测试,借此明确何种光感元件的布局方式更优。考虑到实际测试中调整传感器布局需要耗费较多时间,该系统为此提供了一个极为便捷的试验环境。
4. 离线/在线仿真相结合
该系统支持脱机模拟运行,同时能够借助CAN总线协议与微控制器平台建立连接,从而在虚拟的赛道场景中开展实时的仿真测试。
用户借助这个模拟平台能够持续探索初始构思,当接近理想结果时,便着手车辆制造与赛道测试,这样既节省了开支星空体育app下载入口,又缩短了周期,使智能汽车的制作过程更加高效。
2 基本构架
图1为该模拟系统的整体布局,包含四个主要部分,分别是基础模型部分、调控方法部分、信息交互部分以及模拟场景部分。
基础构成部分涵盖车辆形态与场地形态,操作者能够依据具体情形调整参数值,该部分为整体运作提供了核心动力,所有模拟运算均依托于这两种形态展开。
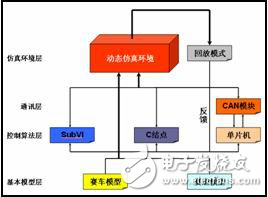
图1 仿真系统构架图
控制算法层为用户呈现了三种不同的模拟方法:SubVI、C节点以及微控制器实时模拟,详细内容将在下文介绍。用户能够挑选其中一种方法来输入或转移自身的控制程序。
通讯部分仅限于微控制器的远程测试,借助CAN接口,能够促成微控制器和测试平台之间的即时信息交换,进而达成动态测试效果。
仿真系统依据车辆与赛道构造星空·体育中国官方网,结合控制方法发来的指令(含驱动管理、方向调整及速度信息等),推算出行驶轨迹,同时将结果立刻反馈至控制方法部分(其运算间隔可变)。
依靠模拟软件的长处,仿真阶段系统能轻易记录各类参数,尤其是实际测试难以获取的数据,例如车辆偏离跑道中心点的程度、行驶角度、加加速度等,并将这些信息存入文档。在重播状态下,使用者可以调取这些文档,对模拟数据执行后续的检测和操作,从而优化赛车构造和操控方法。
 鲁ICP备18019460号-4
鲁ICP备18019460号-4
我要评论